Who We Are
Robotics & AV
We build robust, high-frequency state estimation algorithms, sensor fusion architectures, and spatial calibration frameworks optimized for autonomous vehicles and robotics.

Physical AI
Developing foundational layers bridging AI with the physical world, creating systems that perceive, plan, and act with unprecedented reliability and context-awareness.

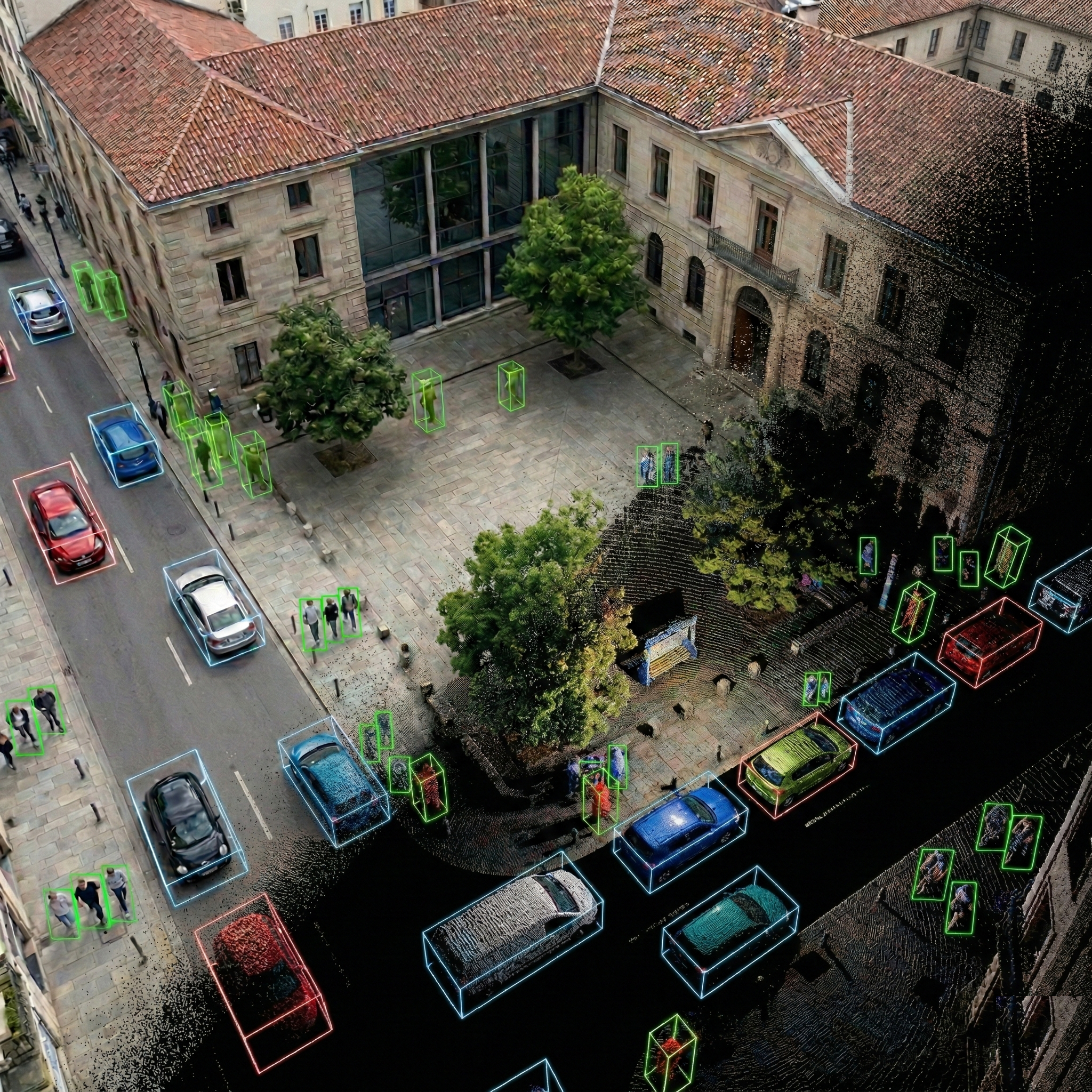
ML for Perception
Advancing machine learning capabilities in computer vision and perception. We architect robust data ecosystems and scalable infrastructure for vision models.